连栋温室作为目前我国应用广泛的设施栽培环境,其迅速发展为温室智能农机装备提出了新的要求。目前已有各种运输机械、栽培管理机械、植保机械等出现在连栋温室中,极大降低了工作强度并提高劳动生产效率。但是由于连栋温室建筑规格与规模不同,栽培模式各异,种植农艺要求复杂多样,因此要求的农机装备尺寸与运行模式不同。目前已有轮式(或轨道)运输车、轨道栽培管理机械与轨道植保机械等装备,已有底盘不能兼顾陆地与轨道两种作业模式。
现有温室底盘存在以下问题:轨道建设规格不同,轨道宽度不同,现有底盘不能在陆地与轨道作业模式下自由切换;轨道轮宽度固定,无法根据轨道宽度的变化进行调整。
鉴于此,我们提出了“一种行走装置底盘”,以期解决温室底盘陆轨模式自由切换和轮距快速高效调整的问题。
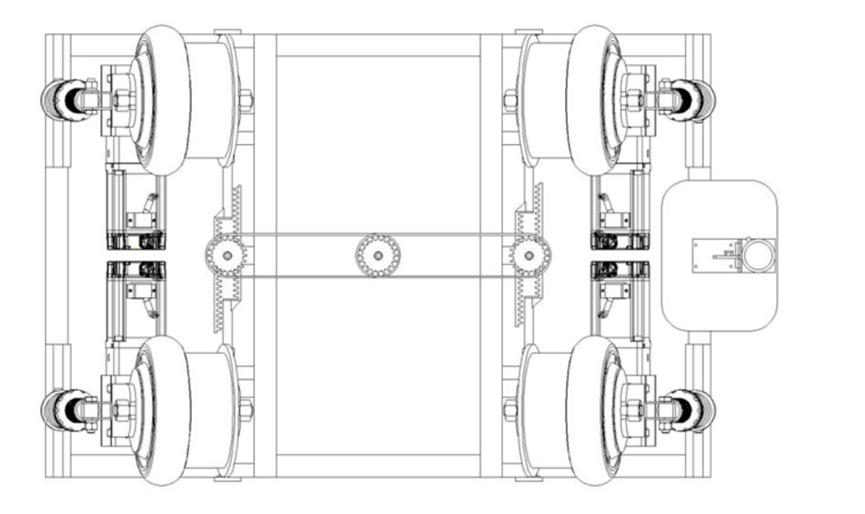
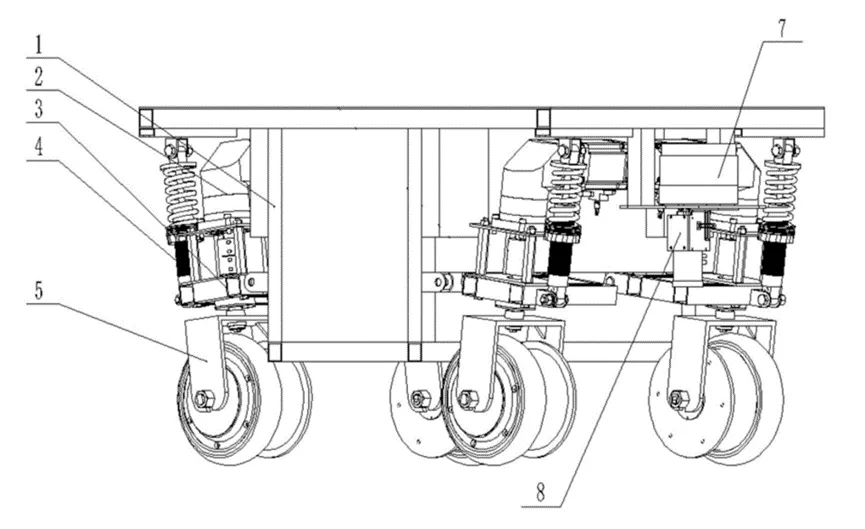
底盘宽度调节机构包括伺服电机、链条、链轮、齿条轴等。齿条轴包括同轴相连的齿条段与轴段,伺服电机通过链条、链轮将动力纵向输送至底盘前侧与后侧,链轮与横向的齿条轴的齿条段啮合,将动力输送至齿条轴的轴段;轴段上设有一凸起部件,凸起部件与宽度调节机构固定装配,进而带动宽度调节机构横向移动,且齿条轴同轴设置于防震转动轴内部,并可相对于防震转动轴转动。通过控制系统控制轮毂行走电机相向或对向运动与伺服电机旋转,实现底盘宽度增加或减小,以适用于不同的温室轨距作业场景。 图1 轮距调整状态示意图 底盘采用四轮独立驱动、转向装置,通过四轮毂电机和转向电机不同速度、角度的运动实现底盘直线、原地转向、平移、阿克曼行走和斜向运动等多种转向与行进方式。底盘还搭配了四轮独立减震装置,保证轮毂电机抓地力与运行平稳性。 图2 四驱四转底盘整机示意图 智慧农业的落地离不开装备,没有智能装备就没有智慧农业,这也必将是未来的发展方向。本发明在2024年获得专利授权证书,目前已运用在团队自研温室陆轨两用番茄采摘机器人和巡检机器人上,提高了温室作业装备灵活性和机动性,提高了温室复杂作业场景的作业能力。 图3 温室陆轨两用番茄采摘机器人 图4 陆轨两用温室巡检机器人